مقدمه ای بر PID Control (بخش دوم)
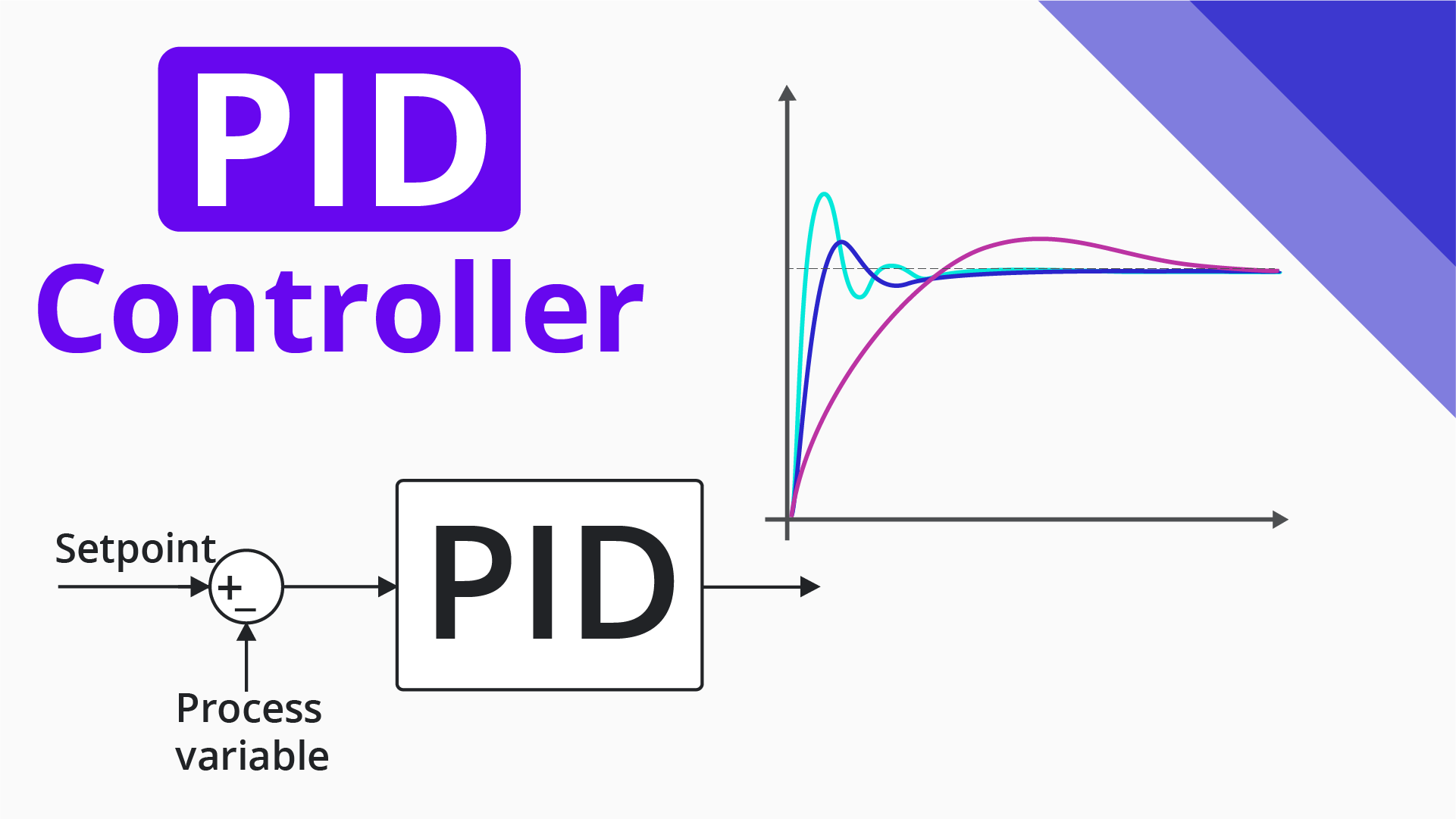
PID Controller
Final Control Element
منظور از آن عملگر یا اکچویتور است که میتواند باعث تغییر در کمیت های فرایندی شود مثلاً یک کنترل می تواند شیر آب ورودی به یک مخزن را باز نموده و باعث تغییر در میزان ارتفاع شود در شکل زیر چند نمونه کنترل بر نشان داده شده است. ( PID CONTROLLER )

PID Controller
آشنایی با سیستم حلقه باز
این سیستم که سیستم بدون بازخورد یا بدون فیدبک نیز نامیده میشود سیستم کنترلی است که در آن مقدار خروجی بر عمل کنترل تاثیری ندارد در حقیقت این سیستم فاقد فیدبک یا بازخورد از فرآیند است در شکل زیر بلاک دیاگرام این سیستم را نشان می دهد. ( PID CONTROLLER )

PID Controller
در سیستمهای صنعتی حلقه باز کنترل عموماً بر مبنای زمان صورت می پذیرد در این حالت طبق برنامه ریزی های قبلی زمان های مشخصی برای انجام عملیات خاص طراحی شده و سیستم مطابق اون خروجی های لازم را تولید میکند
نمونه های از کاربرد سیستم حلقه باز
نمونه از کاربرد این سیستم را میتوان در ماشین لباسشویی یا که عمل پوشاند نشستن و آبکشی در آن بر اساس یک مبنای زمانی انجام میشود و ماشین لباسشویی نتیجه کار یعنی پاکیزگی لباس ها را اندازه گیری نمی کند و از آن برای تصحیح فرمان اعمالی به ماشین استفاده نمی نماید شکل زیر بلاک دیاگرام عملکرد ماشین لباسشویی رو نشان میدهد.

PID Controller
همانطور که در شکل بالا مشخص است کاربرد سکونت زمانی به سیستم کنترل ماشین اعمال نموده و بر اساس آن ماشین عملیات شستن و خشک کردن را انجام میدهد.
آشنایی با سیستم حلقه بسته.
سیستم حلقه بسته سیستمی است که در آن از نتیجه عملیات انجام شده در پروسه یا بازخورد دریافت می شود در این بخش به بررسی اجمالی سیستم حلقه بسته می پردازیم.
آشنایی با اجزاء سیستم حلقه بسته
در سیستم حلقه بسته مقدار کمیت تحت کنترل در پروسه اندازه گیری شده و به عنوان فیدبک با مقدار ورودی مبنا سنجیده شده و فرمان کنترل شده با توجه به اختلاف بین مقدار فیدبک و Set point تولید و اصلاح می شود شکل زیر مدل ریاضی و بلاک دیاگرام این نوع سیستم را نشان می دهد.

PID Controller
یک سیستم حلقه بسته از اجزای زیر تشکیل شده است.
سیستم کنترل:
وظیفه کنترل پروستات را به عهده داشته و توسط توابع موجود در آن فرمان نهایی جهت اعمال به المان نهایی تولید می شود.( مثلاً یک pc یا یک کنترل کننده دیجیتال میتواند به عنوان سیستم کنترل مورد استفاده قرار گیرد)
المان نهایی( عملگر) :
فرمان تولیدی از سیستم کنترل را دریافت نموده و آن را تبدیل به عملیات می نماید مثلاً یک کنترل سیگنال ۴ تا ۲۰ میلی آمپر را از سیستم کنترل دریافت نموده و شروع به حرکت و باز نمودن یا بستن مسیر می کند در حقیقت المان نهایی باعث تغییر در کمیت فیزیکی تحت کنترل پروژه می شود مثلاً یک کنترل و میتواند با باز شدن فلوی آب ورودی به یک مخزن را افزایش و وابسته شدن را کاهش دهد.
سنسور (فیدبک):
مقدار کمیت فیزیکی تحت کنترل در پروسه را اندازهگیری نموده و آن را به صورت سیگنال الکتریکی به سیستم کنترل ارسال میکند به مقدار اندازه گیری شده توسط سنسور پی بک را بازخورد گفته می شود که در واقع نتیجه کار انجام شده توسط المان نهایی است

PID Controller
توجه: در سیستم FCS وظایف سیستم کنترل در خود تجهیزات فیلم تعبیه شده و میتواند یک سیستم حلقه بسته متشکل از سنسور و المان نهایی را پیاده سازی نماید به شکل زیر توجه کنید

PID Controller
عملکرد سیستم حلقه بسته:
هدف سیستم حلقه بسته کنترل یک کمیت فیزیکی در پروسه در یک مقدار دلخواه است مثلاً در یک کلوپ دما دمای یک مخزن و یا در یک لوپ ارتفاع میزان ارتفاع سطح مایع درون یک مخزن کنترل می شود. به هر صورت آنچه که تحت کنترل قرار می گیرد یک کمیت فیزیکی از قبیل دما فشار بهلول سرعت و غیره است که این کمیت معمولاً یک کمیت پیوسته و آنالوگ می باشد.
در یک سیستم حلقه بسته مقدار نقطه تنظیمی به سیستم کنترل اعمال می شود. منظور ازSet point از مقداری است که باید کمیت فیزیکی در آن مقدار قرار گیرد. مثلاً در یک پروسه کنترل دما اگر Set point برابر ۶۰ درجه قرار داده شود به این مفهوم است که باید دما در نقطه ۶۰ درجه قرار گیرد. از طرف دیگر مقدار واقعی کمیت پروسه PV توسط سنسور اندازه گیری شده و به سیستم کنترل اعمال می شود که به آن گفته می شود.
مقدار کنترل با دریافت Set point نزدیک شده و نهایتاً با آن برابر شود. به منظور انجام عملیات فوق روش های مختلفی ارائه شده است که معروفترین آن روش PID است.

PID Controller
خطا و محاسبه آن در سیستم حلقه بسته
منظور از سیگنال خطا ( Error)(E ) تفاضل بین مقدار مبنا(Set point) و مقدار فیدبک (PV) است که بیانگر میزان اختلاف مقدار واقعی کمیت پروسه نسبت به Set point می باشد
E=SP-PV
اولین قدم در کنترل یک سیستم حلقه بسته محاسبه سیگنال خطا است و سپس با توجه به آن فرمان خروجی کنترل کننده برای اعمال به المان نهایی تولید میشود شکل زیر مکانیزم عملکرد سیستم حلقه بسته را نشان میدهد .

PID Controller
توجه: در شکل بالا منظور از M (Measurement Value همان مقدار فیدبک یا PV است.
شکل های زیر یک مثال صنعتی است حلقه بسته است کنترل دما و نحوه عملکرد آن را نشان می دهد

PID Controller
مزایای سیستم حلقه بسته.
استفاده از سیستم حلقه بسته نسبت به سیستم حلقه باز دارای مزایای به شرح زیر است
- اطمینان از تعادل سیستم و رسیدن به نتیجه دلخواه: در این سیستم در صورت پیاده سازی صحیح رسیدن مقدار پروسه به مقدار تنظیمی اپراتور تضمین می شود. منظور از حالت تعادل آن است که با یک تاخیر مناسب مقدار فیدبک برابر مقدار تنظیم شده و در آن مقدار ثابت بماند.
- بهبود عملکرد سیستم: این سیستم میتواند اغتشاشات وارد شده را به خوبی مدیریت و کنترل نماید.
- کنترل اتوماتیک: در کنترل حلقه بسته کنترل پروژه به طور اتوماتیک و بدون دخالت مستقیم انسان صورت می پذیرد در حالیکه در کنترل حلقه باز کنترل پروژه با دخالت مستقیم انسان انجام می گیرد.
برای مطالعه در مورد مقدمه ای بر PID Control (بخش اول) اینجا کلیک کنید.
1 دیدگاه
به گفتگو ملحق شوید و نظرتان را به ما بگویید.
در سیستم حلقه باز منظور از Distrubence چیه
فکر کنید در یک اتاق هستید و می خواهید دمای داخل اتاق را کنترل کنید. شما فقط توانایی کنترل دما داخل را دارید. دمای سرد بیرون به عنوان اغتشاش در نظر گرفته می شود که قابلیت کنترل را ندارد.
احسنت مطلب کاملی گفتید. ادامه بدید